Ansteuerung von Gleichstrommotoren
Projekt: Poti
steuert
Gleichtstrommotor
Nachdem hier beschrieben wurde, wie man Gleichstrommotoren
ansteuert, wollen wir eine kleine drahtgebundene
Fernsteuerung realisieren.
Ein Poti soll einen Motor steuern. Gesteuert wird Drehzahl und
Drehrichtung des Motors.
Was
soll passieren?
Hat das Poti:
- Linksanschlag: Motor dreht sich linksherum mit voller
Geschwindigkeit
- Rechtsanschlag: Motor dreht sich rechtsherum mit voller
Geschwindigkeit
- Mittelstellung: Motor ist aus
- Zwischenstellungen: je weiter das Poti nach links oder
rechts
gedreht wird, umso schneller dreht sich der Motor links- bzw.
rechtsherum
Was kann man nun damit
machen?
Man kann damit ein Modellauto (bei mir war es ein
Kettenfahrzeug)
herumfahren lassen.
Variante 1: ein
kleiner Motor an 5V
Eigenschaften:
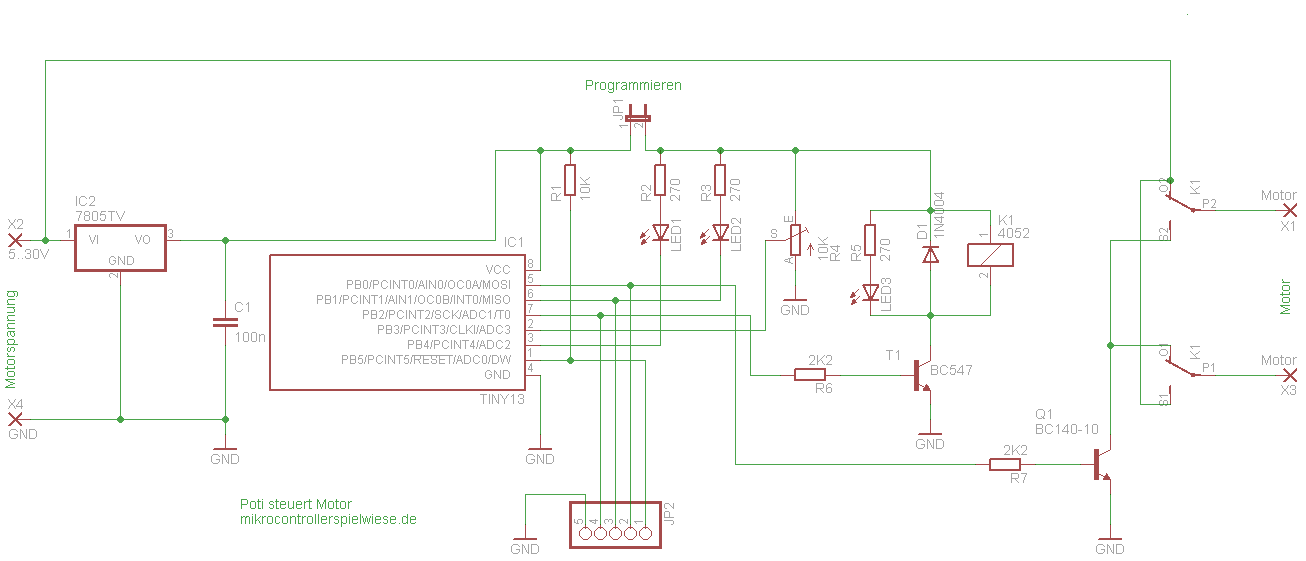
- das Hirn dieser Steuerung ist ein Attiny13
- ein kleiner Motor (z. B. gehackter Servomotor) wird durch
einen Bipolartransistor (BC140) und ein Relais gesteuert (wie und
wozu man Servomotoren hackt, habe ich hier
beschrieben)
- zwei LEDs können und Zustände der
Steuerung anzeigen
- statt der zwei LEDs könntest Du auch die Teile
für einen zweiten Motor auf die Leiterplatte bringen
- Du könntest auch die Programmierschnittstelle
weglassen (hier die
Eagle-Dateien)
- mit einem Spannungsregler IC "7805" könntest Du
auch Motoren mit höheren Spannungen einsetzen
- verschiedene Größen von Potis oder
Trimmern können auf oder außerhalb der Leiterplatte
benutzt werden
- falls es beim Programmieren des Mikrocontrollers zu
Problemen kommen sollte, ziehst Du zum Programmieren den Jumper JP1 ab
Schaltplan:
(Klick zum Vergrößern)

Lauyoutplan:
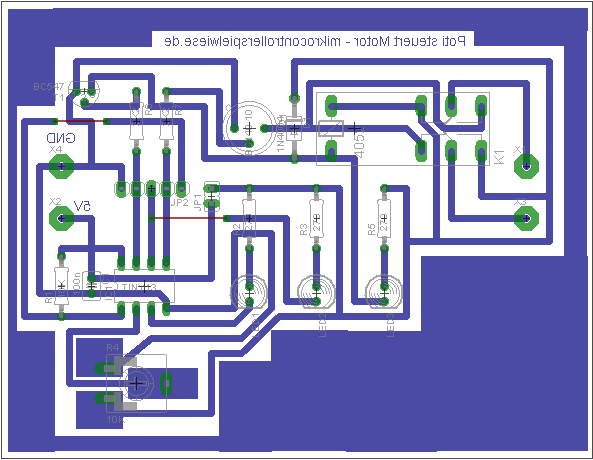
Hier
zum Runterladen die Eagle-Dateien. Einen Quelltext gibt es in
Kürze.
Variante 2: ein
kleiner Motor an Spannung bis 30V
Unterschiede zu Variante 1:
- ein Spannungsregler IC "7805" stellt für den
Attiny13 die 5V Betriebsspannung bereit. Ansonsten wird an die
Schaltung eine Betriebsspannung gelegt, die der Motorspannung
entspricht. Beachte bitte, daß der von Dir verwendete
Transistor natürlich auch die Ströme ertragen
muß, die Dein Motor "zieht"!
Schaltplan:
(Klick zum Vergrößern)
Variante 3:
zwei Motoren
Unterschiede zu Variante 1:
- zwei 5V Motoren werden durch 2 Potis gesteuert
- es gibt keine Programmierschnittstelle, der Reset-Eingang
des Mikrocontrollers ist deaktiviert, um PB5 nutzen zu können
(wie man RESET deaktiviert und PB5 aktiviert, steht hier
beschrieben)
Schaltplan:
(Klick zum Vergrößern)

Variante 4:
dicker Motor
Unterschiede zu Variante 1:
- ein "dicker Motor" wird mithilfe eines Feldeffekttransistors (hier das Datenblatt) und eines Relais gesteuert
Schaltplan folgt in Kürze. Bis dahin: Feldeffekttransistor.
Quelltext:
... für Variante 4 gibt es hier.
Anmerkungen:
- Für diese Experimente sind
natürlich auch prima die Experimentierboards der
Mikrocontrollerspielwiese geeignet.
- Vielleicht solltest Du Dir vorher die Kapitel PWM und Ansteuerung
von
Gleichstrommotoren durchlesen.
|
