Was ist die Mikrocontroller- spielwiese?
Was brauchst Du?
Programmieren lernen
Experimente & Projekte
Downloads & Links
häufige Fragen Impressum |
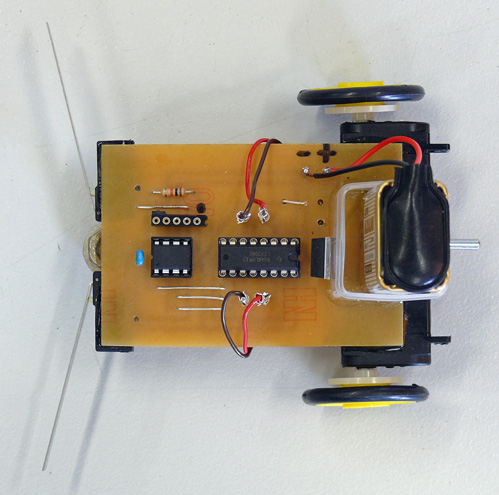
Kurt - ein kleiner Zwei-Rad-Roboter mit FühlernKurt ist ein kleiner hinderniserkennender Roboter, der in erster Linie aus einer Leiterplatte auf Rädern besteht. Er soll einem primitiven Lebewesen ähneln,
welches sich vortastet. Sobald Kurt irgendwo anstößt, hält er an, fährt
ein Stück rückwärts, dreht sich und setzt dann die Erkundung
seiner Umwelt fort. Du kannst ihm natürlich auch viele andere Kunststückchen beibringen,
die Programmierschnittstelle ist ja gleich auf der Leiterplatte.
Kurts Gehirn ist ein AtTiny13 und die Motoren werden von einem L293D angesteuert.
(Klick zum Vergrößern)
a) nötig:
Draht und Werkzeug brauche ich ja wohl nicht erwähnen...
Als Motoren sind Getriebemotoren von Vorteil. Einerseits drehen sie
nicht so schnell, daß Dir Dein Robo davonflitzt, andererseits
weisen sie ein gewisses Maß an benötigter Kraft (Drehmoment) auf.
Es wird jedoch nicht wirklich viel Kraft zum Bewegen eines so kleinen
Roboters benötigt - darum reichen schon sehr kleine, billige Motoren. Ein gewöhnlicher kleiner Getriebemotor war leider bei meinem
Elektronikfachhändler um die Ecke nicht für unter 14 Euro zu bekommen.
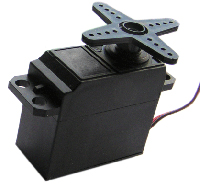
Also habe ich dort zwei billige Servomotoren, ähnlich diesem hier
unten, für
rund 3 Euro pro Stück gekauft:
... und sie wie folgt gehackt:
Ein drittes (passives) Rad ist möglich - ich habe jedoch einfach
eine große
Schraube mit blankem runden Kopf genommen. Darauf kann der Robo prima
auf Teppich und Tisch herumrutschen. Auch ein halber Tischtennisball
kann hier eine Lösung sein.
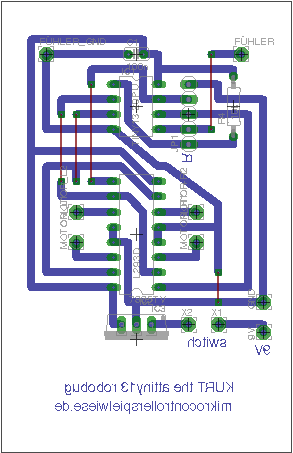
Hier zum Runterladen Schaltplan und Layout im Eagle-Format und den Code-Ordner mit einem
Beispielprogramm.
|