Ansteuerung von Gleichstrommotoren
Mit kleinen Gleichstrommotoren, wie man sie z. B. aus altem
Spielzeug oder Diskettenlaufwerken ausbauen kann, kann
man mit Hilfe des Mikrocontrollers fantastische
Projekte realisieren. So findest Du auf der
Mikrocontrollerspielwiese unter anderem kleine
Roboter, die Hindernisse erkennen oder einer auf dem Tisch aufgemalten
schwarzen Linie folgen. Oder eine Solarzelle, die sich von allein der
Sonne zuwendet.
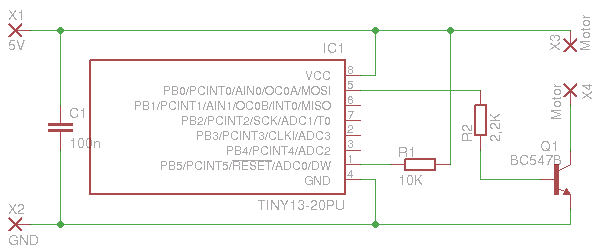
Experiment 1: Ein- und Ausschalten eines kleinen Gleichstrommotors
Der Strom, den man einem Mikrocontroller an seinen Ausgängen entnehmen
kann, reicht für Motoren fast nie aus.
Deshalb benutzen wir einen Transistor, der in der Lage ist, den von
unserem kleinen Motor benötigten Strom zu liefern.
In meinem Falle (ganz kleiner 5V-Spielzeugmotor) reichte ein BC547 aus.
Ein BC140 verträgt noch mehr Strom, habe ich aber nicht probiert.
Wie man einen digitalen Ausgang (hier PB0) benutzt, ist im Projekt Blinksdings beschrieben.
Für Fortgeschrittene: Du kannst mit dieser Schaltung sogar die
Drehzahl des Motors stufenlos steuern. Dazu benutzt Du PWM.
Experiment 2: Ein- und Ausschalten eines großen Gleichstrommotors
Wann ein Gleichstrommotor ein "großer" ist, ist zwar nicht genau
festgelegt - aber der 5V-Motor in der nun folgenden Schaltung benötigte
mehr Strom, als mein kleiner Transistor liefern konnte. Deshalb kam ein
Relais
hinzu.
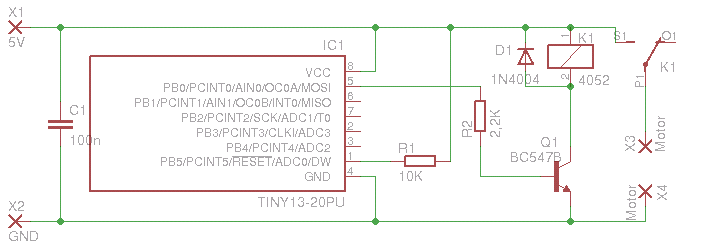
Die Diode am Relais, Freilaufdiode genannt, lassen manche Leute auch
weg. Nicht vergessen: sie ist in Sperr-Richtung geschaltet!
Ich benutze gern die Relais "Finder 4052". Schon deshalb, weil sie
in EAGLE vorhanden sind und auch auf mein Steckbrett passen.

Experiment 3: Drehrichtung eines Gleichstrommotors steuern
Die beiden Umschaltkontakte im Relais K1 bewerkstelligen es, die
Polarität der
Spannung am Motor (und somit die Drehrichtung des Motors) umzukehren.
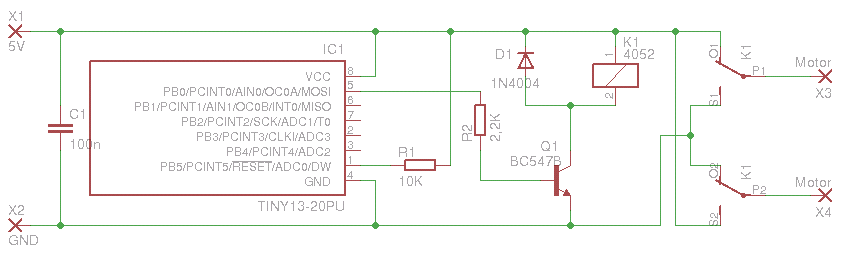
Der Mikrocontroller kann zwar den Motor jetzt nicht mehr ein- und
ausschalten, doch dies ginge durch Ein- und Ausschalten der
5V-Stromversorgung.
Experiment 4: An/Aus und Rechtslauf/Linkslauf
Der Transistor Q2 steuert das An/Aus des Motors und die Stellung der
beiden Relaiskontakte bestimmen die Drehrichtung.
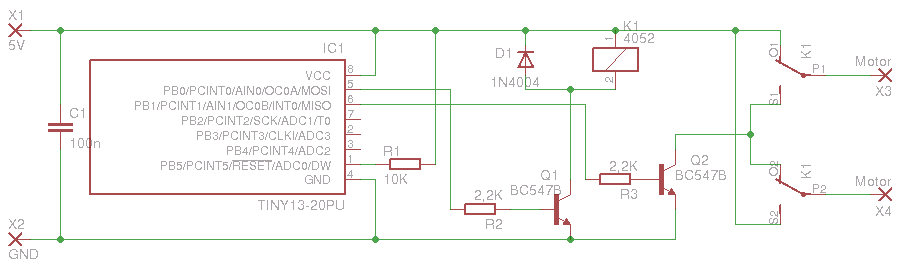
Für Fortgeschrittene: Du kannst auch hier die Drehzahl des Motors
stufenlos mit PWM
steuern.
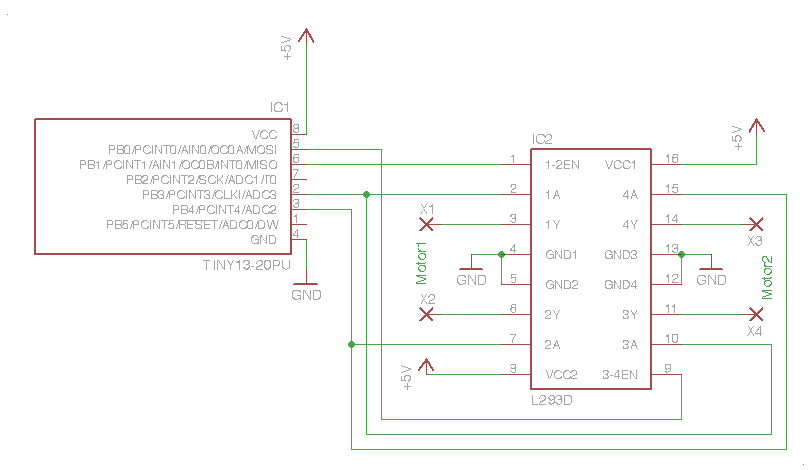
Experiment 5: Zwei Motoren An/Aus und Rechtslauf/Linkslauf
Mit Hilfe des Integrierten Schaltkreises L293D kannst Du gleich zwei
kleine Motoren steuern.
Somit steht Dir für Deinen ersten kleinen Roboter eigentlich nichts
mehr im Wege!
Am Attiny13 hast Du auch noch PB2 frei. Dort könntest Du einen Fühler
(Schalter oder Sensor) anbringen.
Einen kleinen Roboter mit einer sehr ähnlichen Schaltung, findest Du
hier.
Das Datenblatt des L293D gibt es hier.
Du kannst natürlich hier die
Drehzahlen der Motoren stufenlos mit PWM
steuern.
Zur Not steht Dir auch noch PB5 zur Verfügung - jedoch ist dort
gleichzeitig der RESET-Eingang - und da muss man schon noch einiges
mehr
beachten. Wie man RESET zu PB5 macht, steht hier.
Für diese Experimente sind natürlich auch die Experimentierboards der Mikrocontrollerspielwiese geeignet.
|
