Was ist die Mikrocontroller- spielwiese?
Was brauchst Du?
Programmieren lernen
Experimente & Projekte
Downloads & Links
häufige Fragen Impressum |
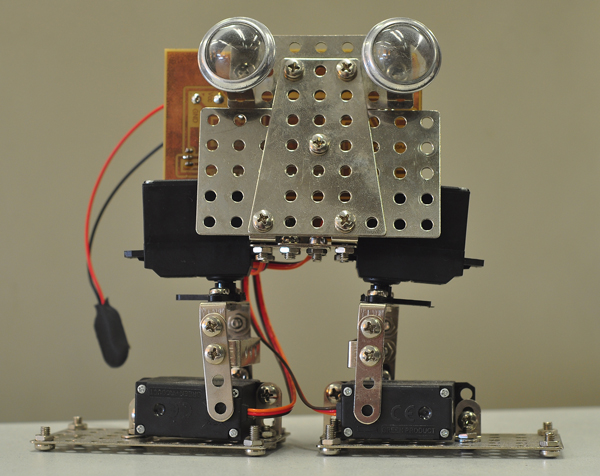
Daisy - ein zweibeiniger Roboter
Die Fortbewegung auf zwei Beinen (biped) ist schwerer als man denkt! Der Mensch hat Hüftgelenke, Kniegelenke, Fußgelenke und jede Menge
Zeugs in den Füßen. Er lernt auch eine Weile, bis er damit sicher
geradeaus und Kurven laufen kann. Gesteuert von einem Gehirn und
einem Gleichgewichtssinn, die unseren Mikrocontrollern und Sensoren
weit überlegen sind. Wagen wir uns dennoch an den Bau eines Zweibeiners, besteht immer
der Kompromiß: je mehr Du wegläßt, desto seltsamer sieht das Laufen
aus.
Merkmale von Daisy:
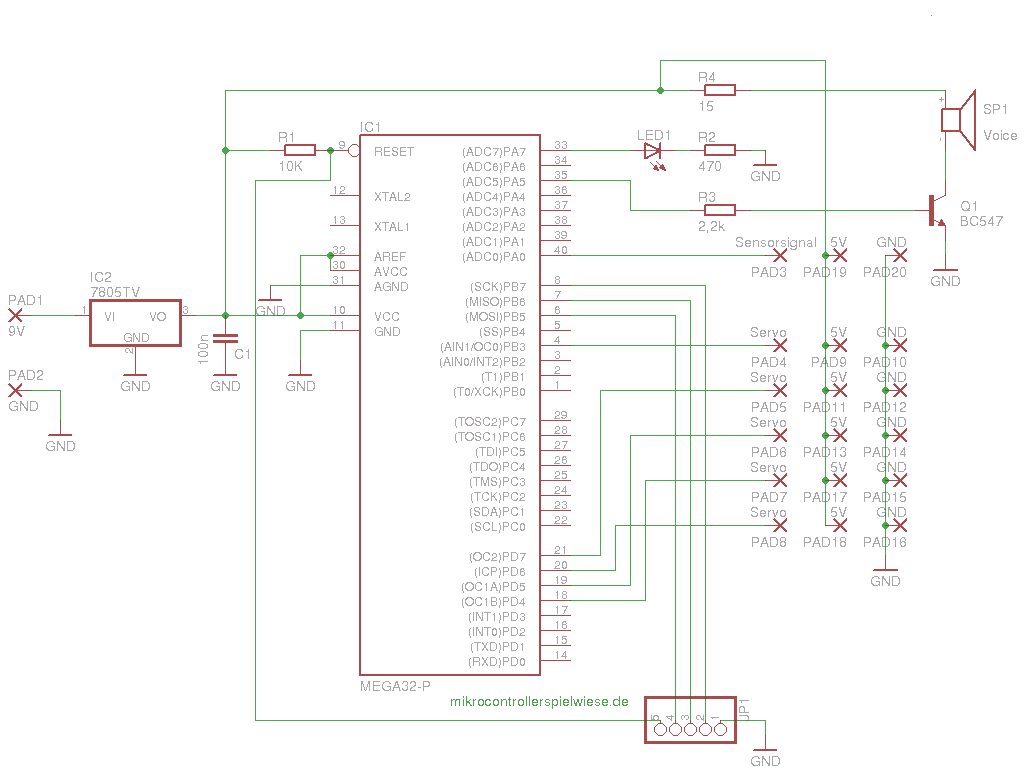
Hier Schaltplan und Board im Eagle-Format vom obigen Beispiel. Und hier die veränderte
Version mit passenden Standard-Servoanschlüssen aber ohne Lautsprecher. Anmerkungen: |