
Was ist die Mikrocontroller- spielwiese?
Was brauchst Du?
Programmieren lernen
Experimente & Projekte
Downloads & Links
häufige Fragen Impressum |
Ansteuerung von Servomotoren
Ein Servomotor (kurz "Servo") ist ein Motor, der sich nicht einmal eine
ganze Umdrehung bewegen kann. 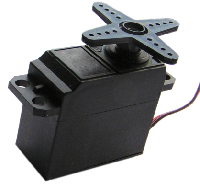
Dafür kann er jedoch einen bestimmten
Drehwinkel einnehmen. Diesen Winkel kannst Du bestimmen.
Für den gewünschten Drehwinkel speist Du ihm in den Signaleingang ein
Rechtecksignal von 1 bis 2 ms (Millisekunden) Breite ein:
Damit der Servo diesen Winkel mit einer gewissen Kraft halten kann, muß
spätestens nach 20 ms ein neuer
Impuls kommen.
#include
<avr/io.h>
#define F_CPU 1200000UL // 1,2 MHz #include <util/delay.h> int main(void){ float z = 1.5; DDRB |= _BV(PB1); while (1) { PORTB |= _BV(PB1); _delay_ms(z); PORTB &= ~_BV(PB1); _delay_ms(20-z); } return 0; }
Du brauchst jetzt nur die Variable z zu verändern, um andere Winkel
anzufahren.
|