Was ist die Mikrocontroller- spielwiese?
Was brauchst Du?
Programmieren lernen
Experimente & Projekte
Downloads & Links
häufige Fragen Impressum |
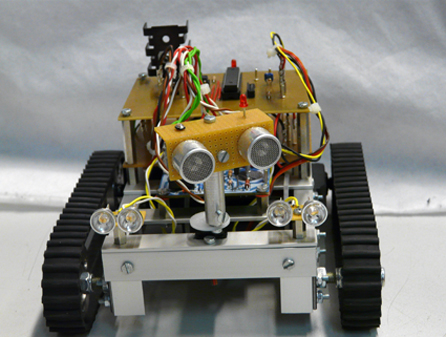
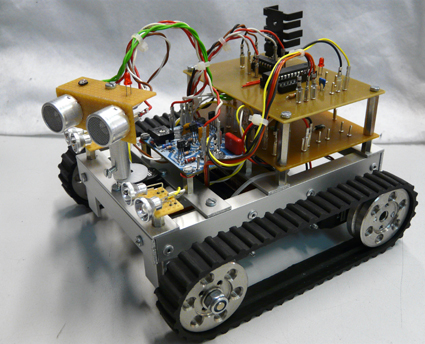
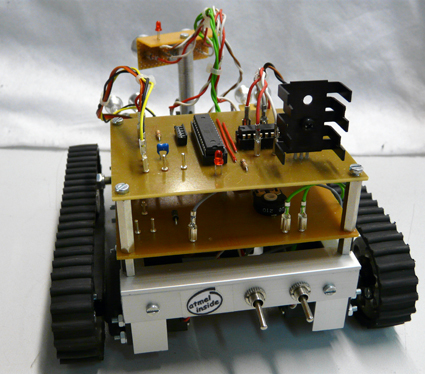
Horst
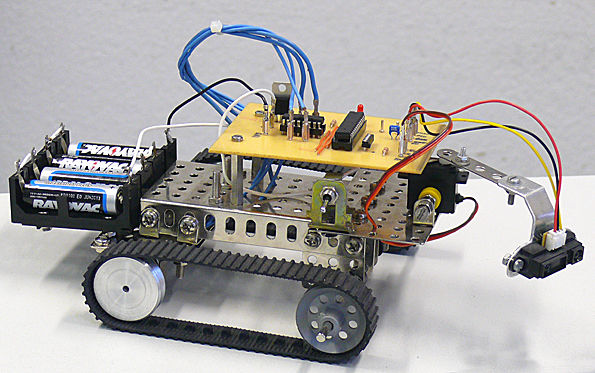
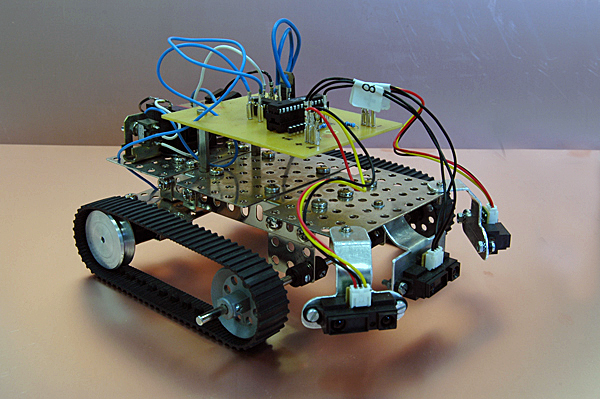
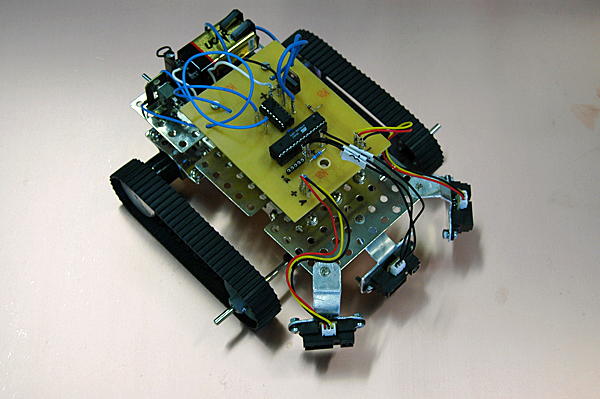
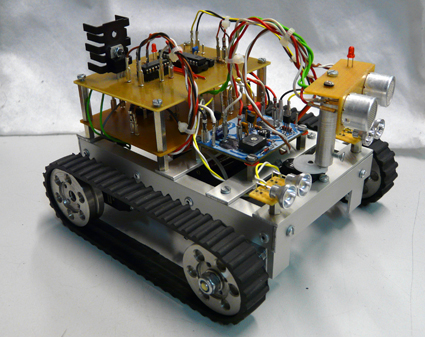
... ein hindernisausweichender, auf
Ketten fahrender Roboter.
|