Was ist die Mikrocontroller- spielwiese?
Was brauchst Du?
Programmieren lernen
Experimente & Projekte
Downloads & Links
häufige Fragen Impressum |
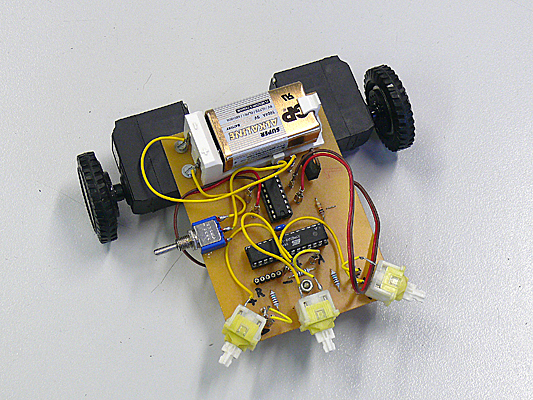
Heinz - ein Zwei-Rad-Robo-BugHeinz ist ein kleiner hinderniserkennender Roboter, der in erster Linie aus einer Leiterplatte auf Rädern besteht. Er soll einem Insekt (engl. "bug" = dt. "Wanze") ähneln,
welches sich vortastet. Sobald Heinz'
Fühler (Taster) auf einen Gegenstand
treffen, kehrt er um und fährt in eine andere Richtung.
Du kannst ihm natürlich auch viele andere Kunststückchen beibringen,
die Programmierschnittstelle ist ja gleich auf der Leiterplatte. Heinz'
Gehirn ist ein Atmega8 und die Motoren werden von einem L293D
angesteuert.
Als Fühler habe ich ihm vorn drei leichtgängige
Taster montiert. Als Motoren sind Getriebemotoren von Vorteil. Einerseits drehen sie
nicht so schnell, daß Dir Dein Robo davonflitzt, andererseits
weisen sie ein gewisses Maß an benötigter Kraft (Drehmoment) auf. Ein gewöhnlicher kleiner Getriebemotor war leider bei meinem Elektronikfachhändler um die Ecke nicht für unter 14 Euro zu bekommen. Also habe ich dort zwei billige Servomotoren für rund je 3 Euro gekauft und diese wie folgt gehackt:
Ein drittes (passives) Rad ist möglich - ich habe jedoch einfach
eine große
Schraube mit blankem runden Kopf genommen. Darauf kann der Robo prima
auf Teppich und Tisch herumrutschen. Auch ein halber Tischtennisball
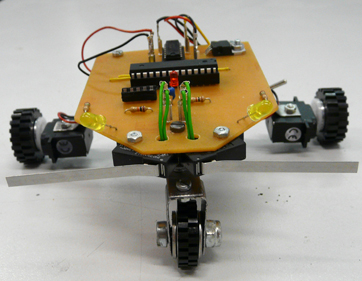
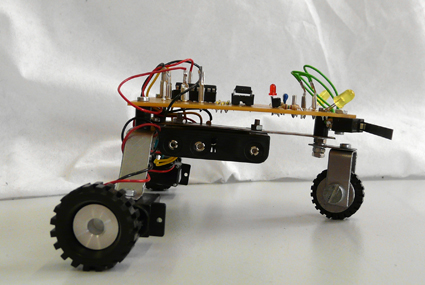
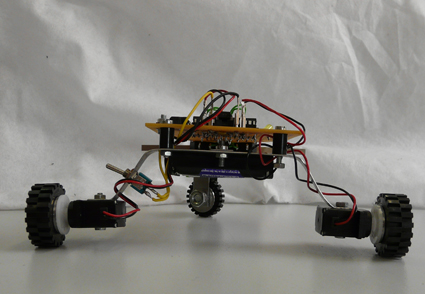
kann hier eine Lösung sein. Hier gibt's den Code und die EAGLE-Dateien. Die Mikrocontrollerspielwiesen-Freunde Andreas S. und Peter K. haben Heinz
nachgebaut und dabei das Layout einwenig verändert. Hier einige Fotos:
|