Was ist die Mikrocontroller- spielwiese?
Was brauchst Du?
Programmieren lernen
Experimente & Projekte
Downloads & Links
häufige Fragen Impressum |
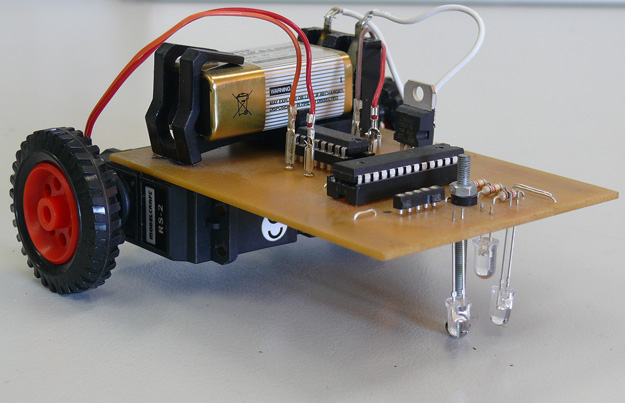
Hans - ein LinienfolgerHans ist ein kleiner Roboter, der es schafft, einer auf dem Tisch
aufgemalten schwarzen Linie zu folgen. Gut geeignet für so eine
schwarze Linie ist z. B. ein flexibles schwarzes Stück Isolierband. Das
kann man dann kurvenförmig auf den Tisch kleben und später
rückstandslos wieder entfernen.
Verhalten: Du kannst ihm natürlich auch viele andere Kunststückchen beibringen,
die Programmierschnittstelle ist ja gleich auf der Leiterplatte. Hans'
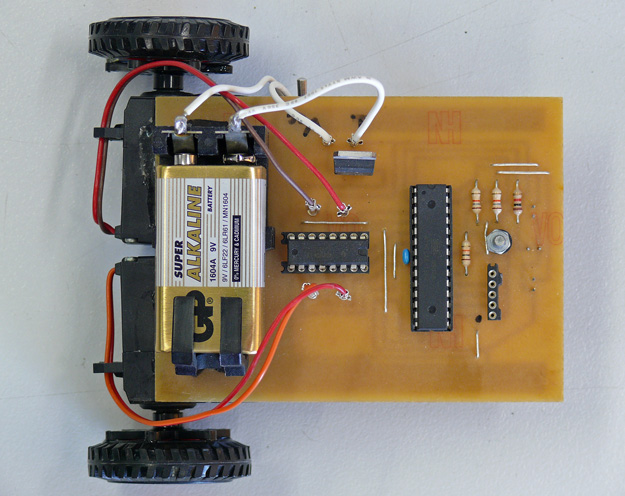
Gehirn ist ein Atmega8 und die Motoren werden von einem L293D
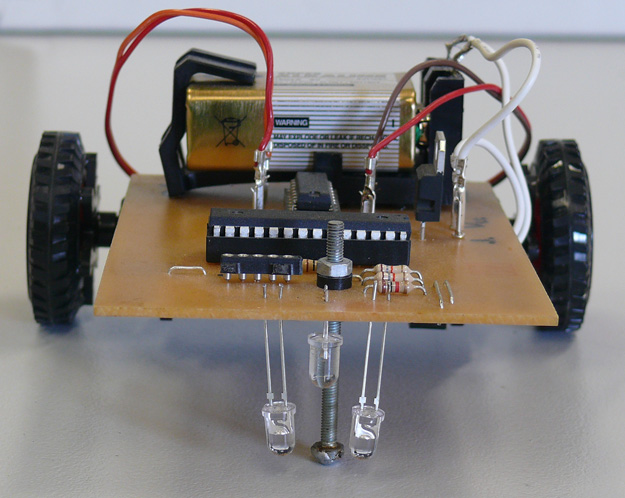
angesteuert. Seine Augen sind zwei Fototransistoren vom Typ SFH300, die
Licht von einer weißen LED bekommen. Als Motoren sind Getriebemotoren von Vorteil. Einerseits drehen sie
nicht so schnell, andererseits
weisen sie ein gewisses Maß an benötigter Kraft (Drehmoment) auf. Ein gewöhnlicher kleiner Getriebemotor war leider bei meinem Elektronikfachhändler um die Ecke nicht für unter 14 Euro zu bekommen. Also habe ich dort zwei billige Servomotoren für rund je 3 Euro gekauft und diese wie folgt gehackt:
Ein drittes (passives) Rad ist möglich - ich habe jedoch einfach
eine große
Schraube mit blankem runden Kopf genommen. Darauf kann der Robo prima
auf Teppich und Tisch herumrutschen. Auch ein halber Tischtennisball
kann hier eine Lösung sein. Hier gibt's den Code und die EAGLE-Dateien.
Anmerkungen:
|