Was ist die Mikrocontroller- spielwiese?
Was brauchst Du?
Programmieren lernen
Experimente & Projekte
Downloads & Links
häufige Fragen Impressum |
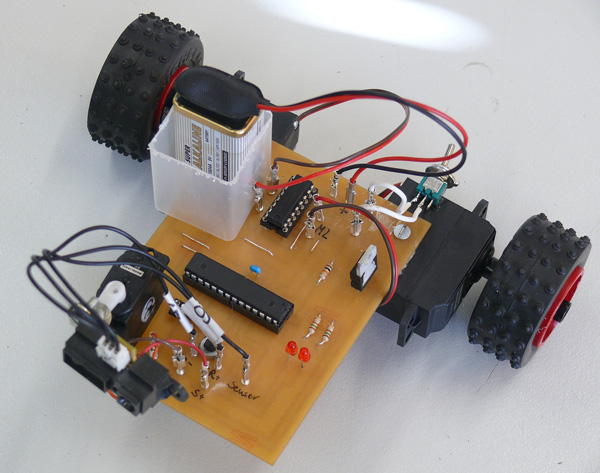
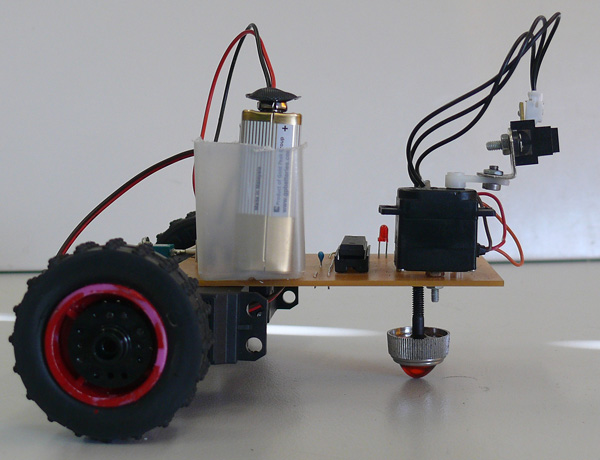
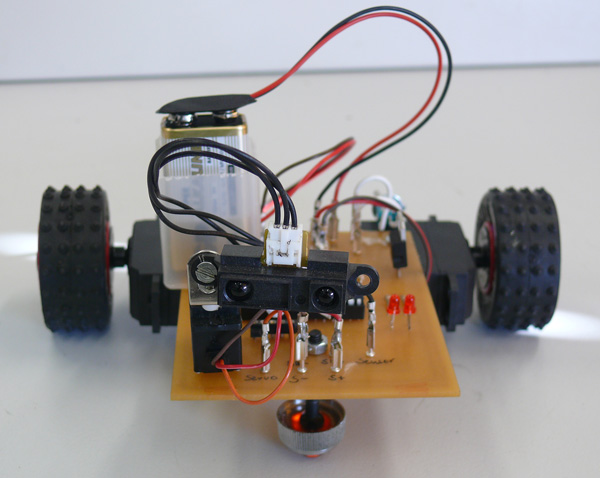
Bernd – ein hindernisausweichender RoboterBernd ist ein Roboter, der in erster Linie aus einer herumfahrenden
Leiterplatte mit 2 Rädern und einem
schwenkenden Abstandssensor besteht.
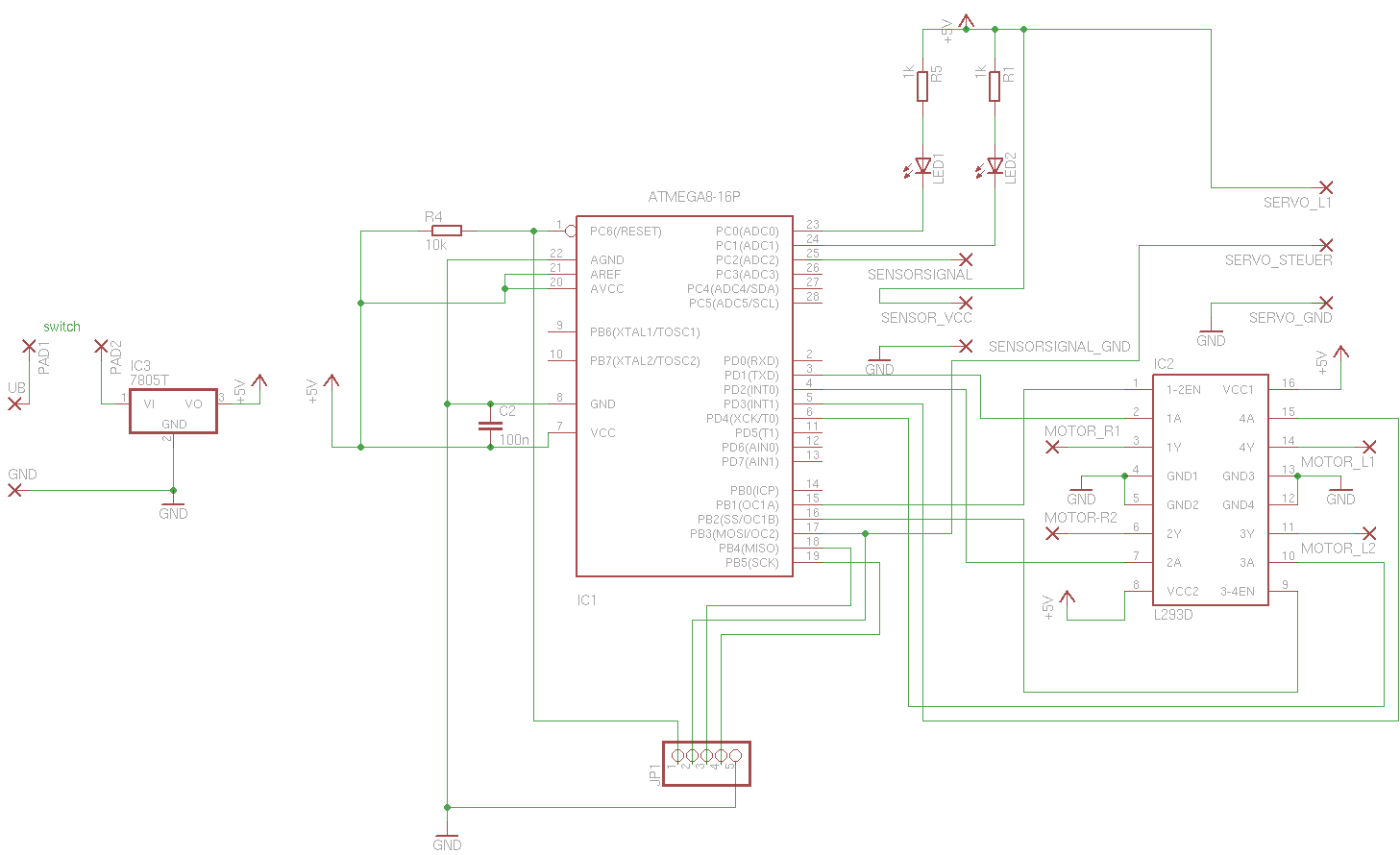
Verhalten: Aufbau: Schaltplan (Klick zum Vergrößern):
Hier der gepackte Ordner mit den Eagle-Dateien und dem Code. Entwickelt und gebaut wurde Bernd mit den Mitteln der
Mikrocontrollerspielwiese von Stefan Eisold und Oliver Klimpke. |