Was ist die Arduinospielwiese? Was brauchst Du? Experimente & Projekte Downloads & Links häufige Fragen  Impressum
Impressum |
Servomotor hackenZum Antreiben von Rädern oder Ketten bei Robotern sind sogenannte Getriebemotoren von Vorteil. Einerseits drehen sie
nicht so schnell, dass Dir Dein Robo davonflitzt, andererseits
weisen sie ein gewisses Maß an benötigter Kraft (Drehmoment) auf.
Es wird jedoch nicht wirklich viel Kraft zum Bewegen von kleinen
Robotern benötigt - darum reichen schon sehr kleine, billige Motoren.
Hier mal ein Versuch, einen Minimal-Roboter zu bauen: Ein gewöhnlicher kleiner Getriebemotor war leider bei meinem
Elektronikfachhändler um die Ecke nicht für unter 14 Euro zu bekommen.
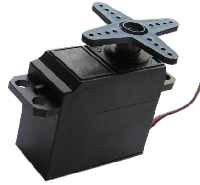
Also habe ich dort zwei billige Servomotoren, ähnlich diesem hier
unten, für
rund 3 Euro pro Stück gekauft: ... und sie wie folgt gehackt:
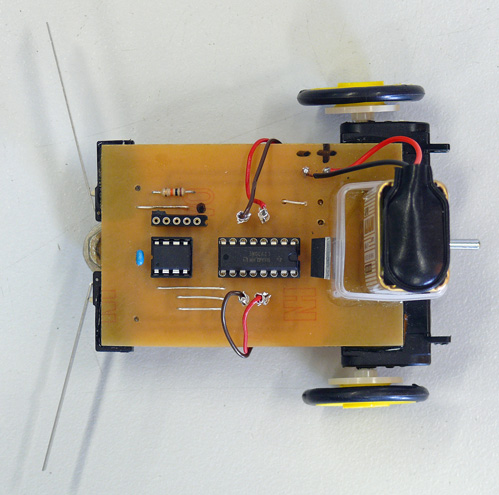
Doch jetzt nochmal zu Kurt: Ein drittes (passives) Rad ist möglich - ich habe jedoch einfach
eine große
Schraube mit blankem runden Kopf genommen. Darauf kann Kurt prima
auf Teppich oder Tisch herumrutschen. Auch ein halber Tischtennisball
kann hier eine Lösung sein.
Weitere Roboter, die wir auf der
Mikrocontrollerspielwiese gebaut haben: 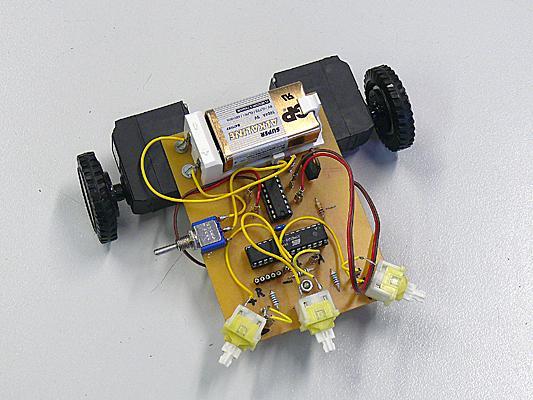 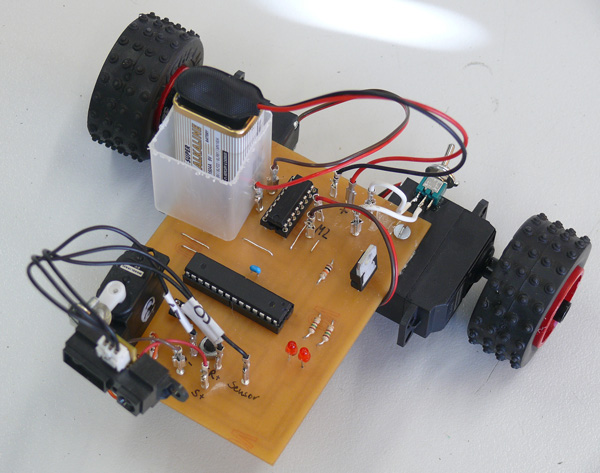 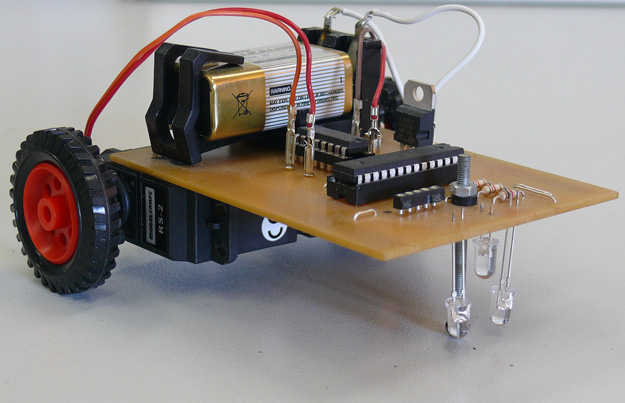 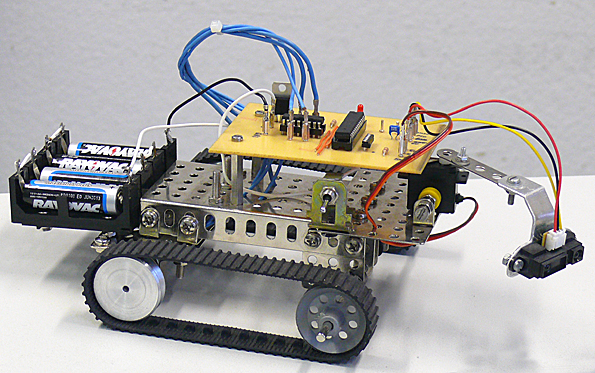 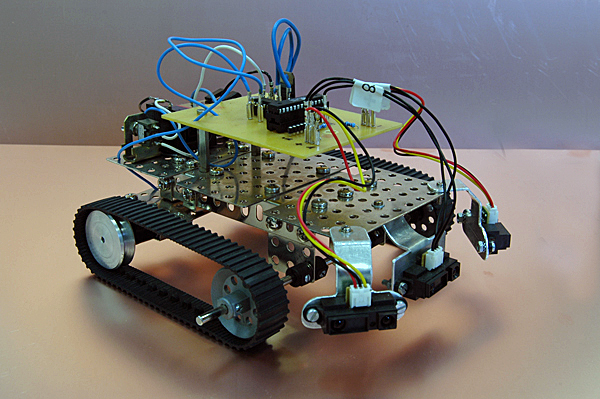 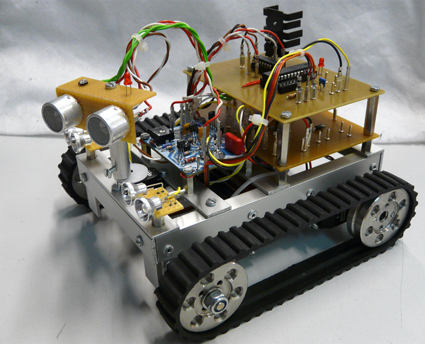 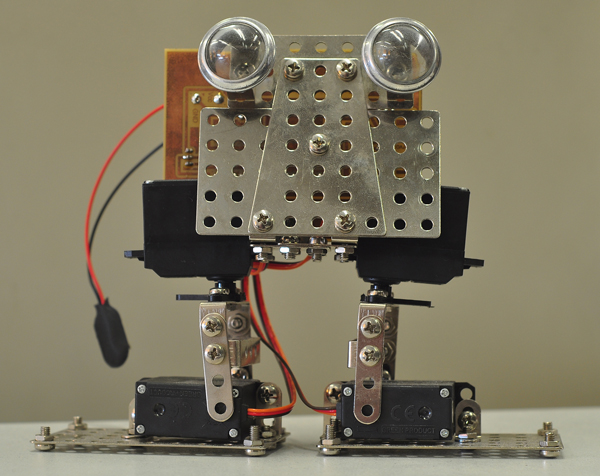 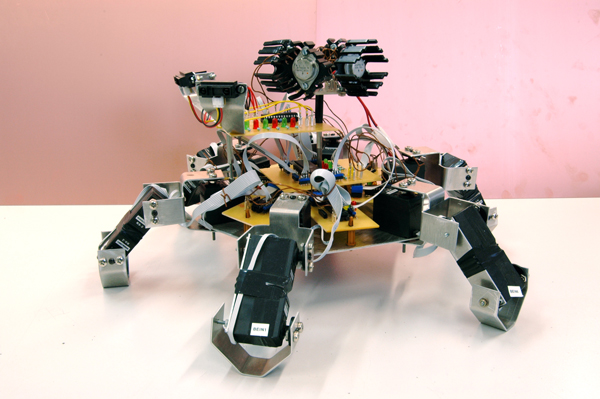 |